I’ve been working on the Prismatik code to get it ready to go back onto the main branch so I thought I’d post a little update.
(more…)Arduino
DIY Ambilight

When I moved house I disassembled my bookshelf lighting and my Mote kit has been sitting in a box since. I’ve been looking for something to do with them and it struck me that the Mote sticks are the perfect size to be mounted behind a monitor for a DIY Ambilight setup.
(more…)Xmas Fireplace Ornament PCB

Inspired by seeing Xmas-themed-PCBs all over Twitter, an idea popped into my head. Two days later, I’d sent off a new PCB for manufacture.
(more…)PCB Pin Badges – Clamps 2.0 (Part 2)
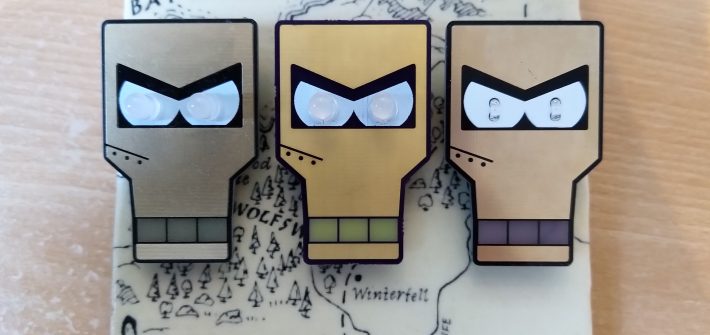
Just in time for the weekend all the parts for version 2 of my Clamps badge arrived!
Here’s a look at the bare PCB from OSHPark – annoyingly I had issues with the front ENIG finish on two of the badges, and the front soldermask on all three to varying degrees. OSHPark have sent some replacements off for fabrication but I decided to press ahead with the best of the bunch.
(more…)PCB Pin Badges – Clamps 2.0 (Part 1)
After my first batch of Clamps badges sold out on Tindie, I was lamenting that I didn’t have any spare boards to put rainbow LEDs in. Jon Raymond suggested that I could go one step further and add an ATtiny85 and some RGB LEDs. Not one to turn down a challenge, I started work!
BSG Chronometer (Part 1)

So this is a project that has maybe been percolating for 7 years or so and now I feel confident enough to tackle it!
Optical Odometry (Part 2)
This is the second part of a series investigating the use of optical sensors for robot odometry.
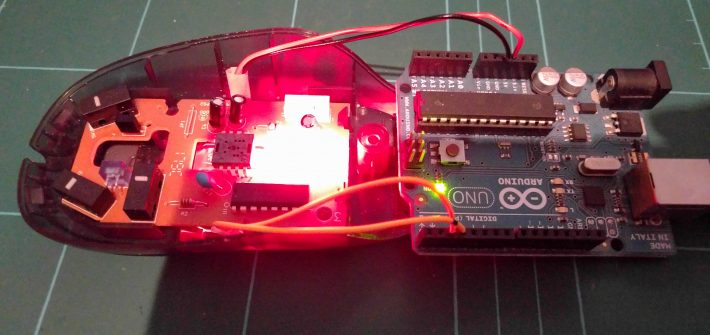
In part one of this project I pulled apart an old Microsoft Intellimouse for the optical chip and managed to extract some readings using an Arduino Uno. The aim now is to repackage those components in a way that they could be mounted underneath a small wheeled robot. (more…)
Optical Odometry (Part 1)
For the last few years I’ve taken part in the local Rampaging Chariots competition along with a group of graduates. One of our most recent challenges has been to get a rover to autonomously navigate the assigned assault course. So lately I’ve been thinking a lot about odometry, that is, estimating the position of a robot over time. Typically, a cheap method of tracking the position of a rover is by attaching rotary encoders to the output shaft of the drive wheels. Unfortunately as the traction of the drive wheels isn’t perfect, they will slip occasionally and introduce errors into the estimated position.
LED Matrix 2.0 Update
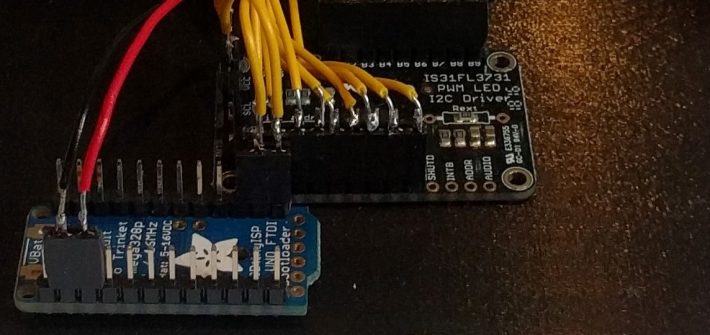
So I finally decided on an Adafruit Pro Trinket to replace the Arduino Uno hanging off the back of my new LED Matrix.
- 3D Printing
- ...
LED Matrix 2.0
We can rebuild him; we have the technology.
So a few posts ago I hinted that I was thinking about rebuilding my old hand-soldered LED matrix using 3D printing to assist me, here’s a log of that build!