With all of the Chronometer PCBs assembled this post takes a look at some of the animations I’ve created to show it off.
(more…)Programming
Battlestar Chronometer v2 – Reference
This post provides instructions for using the Battlestar Chronometer PCB.
(more…)Battlestar Chronometer v2 (Part 3 – Assembly)

The Easter Bank Holiday weekend was the perfect opportunity to get through a lot of soldering.
(more…)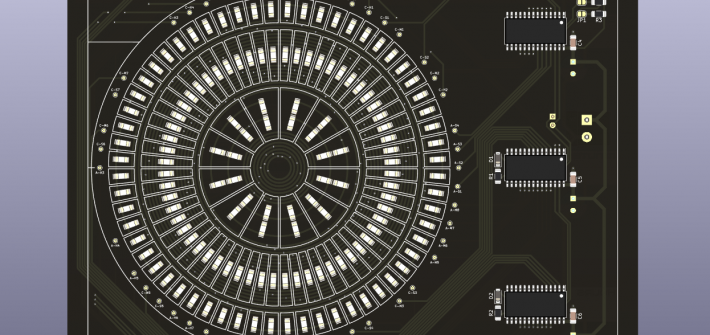
Battlestar Chronometer v2 (Part 1)
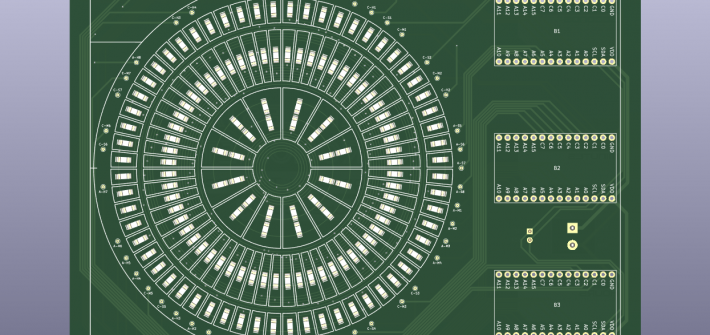
At the culmination of what I’ll now call “version 1” of the Battlestar Chronometer, I highlighted a few things that I’d like to improve in a future version. It didn’t take long for me to start on “version 2”.
(more…)BSG Chronometer (Part 4 – Finale?)

It’s been a couple of years since I last posted about my Battlestar Galactica Chronometer. In this post I’ll wrap up all of the progress since then and hopefully bring the project to an end.
(more…)
DIY Ambilight – Update
I’ve been working on the Prismatik code to get it ready to go back onto the main branch so I thought I’d post a little update.
(more…)DIY Ambilight

When I moved house I disassembled my bookshelf lighting and my Mote kit has been sitting in a box since. I’ve been looking for something to do with them and it struck me that the Mote sticks are the perfect size to be mounted behind a monitor for a DIY Ambilight setup.
(more…)Xmas Fireplace Ornament PCB

Inspired by seeing Xmas-themed-PCBs all over Twitter, an idea popped into my head. Two days later, I’d sent off a new PCB for manufacture.
(more…)