With all of the Chronometer PCBs assembled this post takes a look at some of the animations I’ve created to show it off.
(more…)Electronics
Battlestar Chronometer v2 – Reference
This post provides instructions for using the Battlestar Chronometer PCB.
(more…)PCB Pin Badges – 65 Blinky

While I’m struggling to find the time to finish assembling the Chronometers, I did manage to throw together a new pin badge – this time with blinking LEDs!
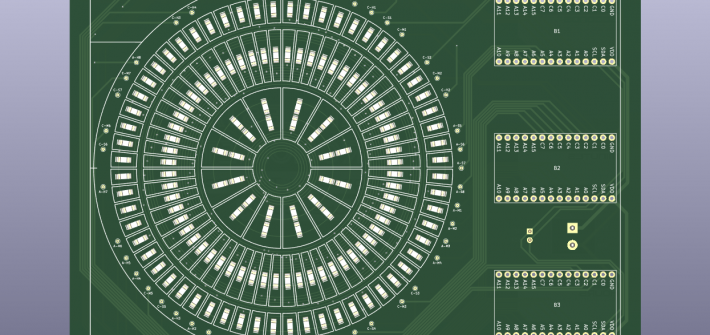
(more…)Battlestar Chronometer v2 (Part 3 – Assembly)

The Easter Bank Holiday weekend was the perfect opportunity to get through a lot of soldering.
(more…)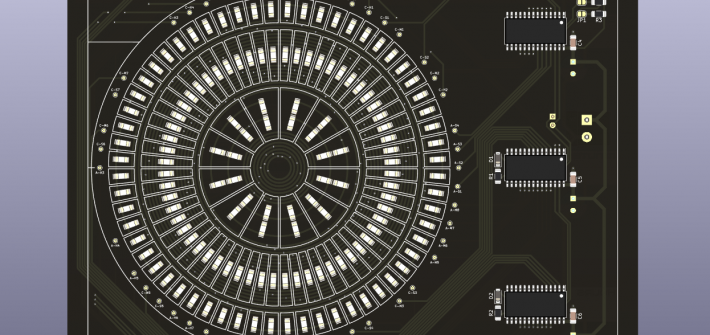
Battlestar Chronometer v2 (Part 1)
At the culmination of what I’ll now call “version 1” of the Battlestar Chronometer, I highlighted a few things that I’d like to improve in a future version. It didn’t take long for me to start on “version 2”.
(more…)BSG Chronometer (Part 4 – Finale?)

It’s been a couple of years since I last posted about my Battlestar Galactica Chronometer. In this post I’ll wrap up all of the progress since then and hopefully bring the project to an end.
(more…)Audio Switcher
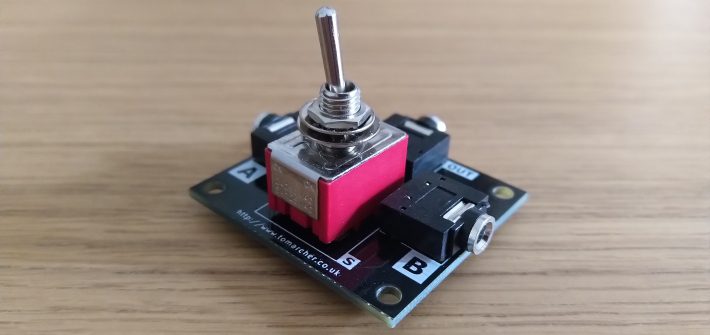
Like many I’ve been working from home over the last year or so. While I have a reasonable speaker system connected to my desktop PC, I can’t use it while I’m working on my laptop. The solution as ever lies in a custom PCB!
(more…)Audio Attenuator № 2

The volume control knob for my PC speakers has been intermittent as long as I’ve had them. Sometimes the left or right channel drops out entirely, other times one of the channels is quieter than the other. I’m not sure why it took me so long to realise I had the means to replace it but here we are.
(more…)