Having the Perturbator and Meeple pin badges under my belt, it was finally time to try something a little bit more complicated.
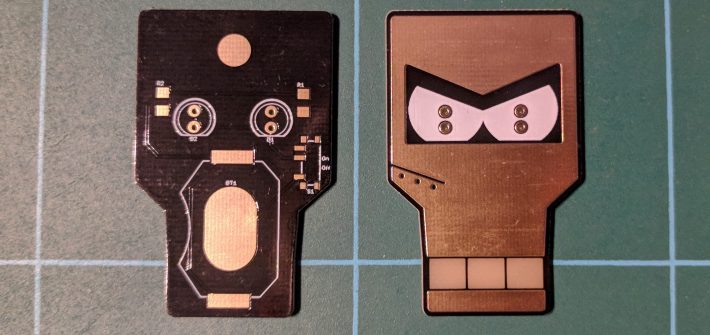
Inspired by Day of the Geek badge that I own, I thought I’d try a memorable robot from Futurama: Francis X. Clampazzo.
Having the Perturbator and Meeple pin badges under my belt, it was finally time to try something a little bit more complicated.
Inspired by Day of the Geek badge that I own, I thought I’d try a memorable robot from Futurama: Francis X. Clampazzo.
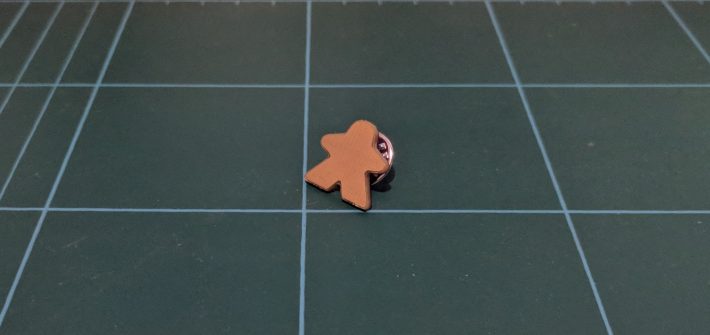
Over Christmas I stumbled across a cute Meeple lapel pin, which I of course bought. While it works well as a tie pin, I’d like something a little closer to the real Meeple size for my coat, so as soon as I got back to my PC I had to try my hand at making a PCB version.
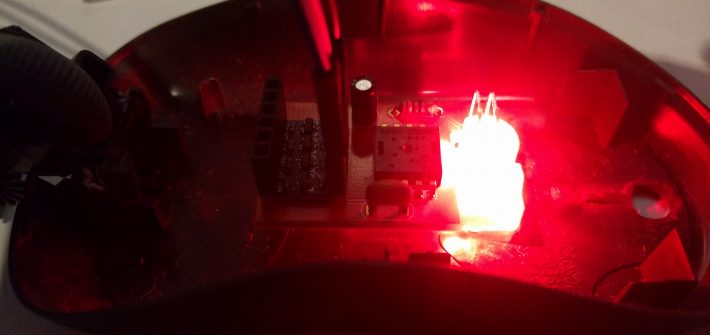
This is the second part of a series investigating the use of optical sensors for robot odometry.
In part one of this project I pulled apart an old Microsoft Intellimouse for the optical chip and managed to extract some readings using an Arduino Uno. The aim now is to repackage those components in a way that they could be mounted underneath a small wheeled robot. (more…)
